

Com hidrogênio, IA e quatro patas, o Corleo o “robô-cavalo” deve estrear na Expo 2030 e chegar ao público em 2035.
A Kawasaki confirmou que o Corleo, seu veículo robótico de quatro patas inspirado em um cavalo – ou um “robô-cavalo”, deixou de ser apenas um conceito futurista e já tem produção planejada. O projeto, que inicialmente era tratado como uma aposta para um futuro distante — com previsão apontada para 2050 — passou por uma mudança de rota e agora segue um calendário bem mais agressivo.
A nova projeção é clara: o Corleo deve aparecer primeiro como experiência pública e, depois, virar produto comercial. A meta da fabricante é disponibilizar o “robô-cavalo” para uso de visitantes durante a Expo 2030, em Riade (Arábia Saudita). Se tudo correr como planejado, a venda ao público começaria em 2035, marcando o início de uma nova categoria de mobilidade: uma mistura de motocicleta, robótica e montaria.
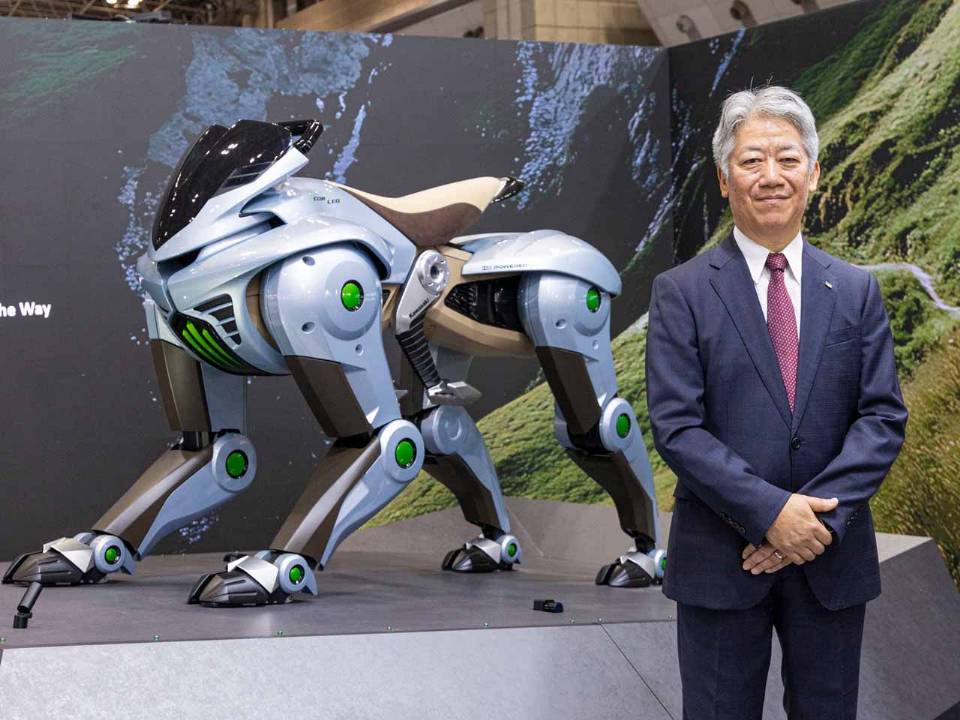
O Corleo ganhou grande repercussão em 2025, durante a Expo 2025 em Osaka, no Japão, quando a Kawasaki apresentou o equipamento como um veículo experimental. O destaque estava na proposta ousada: um robô de quatro patas com “cascos” mecânicos, alimentado por um sistema a hidrogênio e criado para transitar onde motos tradicionais teriam dificuldade.
Na época, o tom era de longo prazo, com expectativa de amadurecimento tecnológico em décadas. Agora, a Kawasaki informa que o projeto entrou em uma nova fase de desenvolvimento, saindo da categoria “futurismo distante” e entrando no campo das metas industriais.
Para isso, a empresa estruturou uma operação específica para acelerar o avanço do Corleo.
O que mudou no projeto?
- O Corleo saiu do status de “ideia conceitual” e passou a ter planejamento real de produção
- A Kawasaki definiu etapas públicas e comerciais: Expo 2030 → mercado em 2035
- Foi criado um time dedicado exclusivamente ao desenvolvimento do veículo
Com a intenção de encurtar o caminho até a produção, a Kawasaki anunciou a criação da Safe Adventure Business Development Team, uma operação voltada exclusivamente para o avanço do robô.

A proposta desse grupo é centralizar esforços, testes e desenvolvimento, com foco em transformar o Corleo em um produto funcional para ambientes extremos — e não apenas uma vitrine tecnológica.
A definição da Expo 2030 como marco de demonstração pública também deixa claro que a empresa busca validar o projeto diante de grande público, onde segurança, estabilidade e experiência do usuário serão colocadas à prova.
Um dos movimentos mais estratégicos do cronograma é a criação de um caminho “intermediário” para o público conhecer o Corleo antes do lançamento físico.
A Kawasaki informou que está desenvolvendo um simulador de pilotagem, que permitirá experimentar virtualmente como seria conduzir o veículo robótico de quatro patas.
Segundo a empresa, o simulador deve estar pronto em 2027 e terá um diferencial importante: ele será alimentado com dados reais do desenvolvimento do Corleo, incluindo:
- modelos 3D
- informações de movimento
- simulações de comportamento e resposta do sistema
Além disso, a companhia pretende integrar o projeto a aplicações de games e e-sports, o que amplia a visibilidade do Corleo para além do setor automotivo e aproxima a tecnologia de um público mais jovem e conectado.
📌 Destaque: a Kawasaki aposta que a experiência virtual pode ajudar a criar cultura de uso e acelerar a aceitação do veículo antes da estreia comercial.
O Corleo foi pensado para enfrentar terrenos acidentados, especialmente regiões com inclinação, obstáculos e instabilidade — como áreas montanhosas, encostas rochosas e passagens com água.
A proposta é unir a experiência de pilotagem típica da Kawasaki no universo das motos com robótica avançada, resultando em um veículo que se locomove com quatro “patas” e mantém maior controle em situações extremas.

Entre os pontos principais do funcionamento, estão:
- pernas traseiras operando de forma independente
- estrutura pensada para absorver impactos
- locomoção baseada em equilíbrio e distribuição de peso
- dinâmica semelhante à montaria tradicional, porém sem rédeas
Na prática, isso significa que o piloto comandaria o veículo principalmente por meio do corpo, alterando o centro de gravidade e realizando movimentos que influenciam a estabilidade e a direção — um conceito que se aproxima da forma como cavaleiros conduzem um animal em terreno difícil.
Trecho-chave do conceito: o Corleo não se comporta como uma moto comum; ele exige uma condução mais “orgânica”, baseada em postura e deslocamento corporal.
Outro pilar do Corleo é o uso de inteligência artificial para lidar com superfícies variadas e imprevisíveis.
A ideia é que o robô consiga “interpretar” o ambiente e ajustar os movimentos das patas automaticamente para:
- manter tração em terrenos irregulares
- equilibrar o conjunto em áreas inclinadas
- melhorar a estabilidade ao atravessar água ou obstáculos
- oferecer mais manobrabilidade do que veículos de duas rodas em condições extremas
Essa proposta reforça o posicionamento do Corleo como um veículo voltado a situações em que a mobilidade tradicional encontra limitações — e onde a estabilidade de “quatro apoios” pode ser uma vantagem decisiva.
O sistema de energia do Corleo também chama atenção: segundo informações divulgadas pela própria Kawasaki, o veículo deve utilizar um motor a hidrogênio de 150 cilindradas, que funciona como gerador de eletricidade para movimentar as pernas robóticas.
O hidrogênio seria armazenado na traseira do veículo, em cilindros próprios, e o conceito aposta em operação com:
- baixas emissões
- funcionamento mais silencioso
- alternativa aos modelos a combustão em uso extremo
Mesmo com o avanço do cronograma, a Kawasaki ainda não detalhou aspectos fundamentais do projeto para o mercado, como a escala industrial.
📌 Importante: apesar da confirmação de que haverá produção planejada, a empresa ainda não revelou quantas unidades pretende fabricar e não divulgou estimativa de preço.
Além da mobilidade, o Corleo deve trazer recursos tecnológicos típicos de veículos modernos, incluindo uma tela de navegação com GPS.
A proposta é que o sistema:
- mapeie rotas
- auxilie o piloto durante o trajeto
- ajude a manter a condução mais segura
- contribua para estabilizar o conjunto ao considerar o centro de gravidade
Em um veículo pensado para terrenos instáveis, recursos de navegação e orientação podem ser determinantes para transformar a experiência em algo realmente aplicável fora de demonstrações.
Com o cronograma acelerado e etapas já definidas, o Corleo deixou de ser apenas “uma curiosidade futurista”. Ainda assim, algumas respostas seguem em aberto — e serão decisivas para medir o impacto real do veículo no mercado.
Entre as informações que ainda não foram divulgadas pela Kawasaki estão:
- preço estimado para o consumidor final
- quantidade de unidades previstas
- nível de autonomia e tempo de operação
- limites de carga/peso do piloto
- planos de manutenção, assistência e reposição de componentes
A expectativa, agora, recai sobre os próximos anos, especialmente com a chegada do simulador em 2027 e a meta de demonstração pública na Expo 2030. Se o projeto cumprir o cronograma, a próxima década pode marcar a estreia de uma mobilidade inédita: um “cavalo robótico” pronto para andar onde poucos veículos conseguem chegar.
Quer ficar por dentro do agronegócio brasileiro e receber as principais notícias do setor em primeira mão? Para isso é só entrar em nosso grupo do WhatsApp (clique aqui) ou Telegram (clique aqui). Você também pode assinar nosso feed pelo Google Notícias.